

info@gerb.com
Практический пример технологий демпфирования для высотных зданий: Комфорт и безопасность
Совет по высотным зданиям и городской среде (CTBUH) — руководство по системе демпфирования
Испытательная башня Thyssen Krupp, Ротвайль (Германия)
Данные проекта
- Год реализации:
2016 (завершение строительства) - Девелопер/подрядчик/владелец:
Krupp Hoesch Stahl GmbH/Thyssen Krupp Elevators - Архитектурный проект:
Werner Sobek совместно с JAHN Architects Stuttgart and Chicago - Конструкционный проект:
Werner Sobek Stuttgart - Поставщик решения по демпфированию:
GERB Vibration Control Systems - Испытательная лаборатория:
Wacker Ingenieure (проектирование систем ветрозащиты/испытания в аэродинамической трубе) - Высота/межэтажная высота:
246 м/3,3 м (офисное пространство) - Коэффициент гибкости:
1/11,8 - Этажи:
Офисное пространство на 27 уровней/8 этажей - Общая площадь башни:
340 кв. м - Функция здания:
Башня для испытаний лифтов/офисы/смотровая площадка (232 м) - Конструкционный материал:
Железобетон (C50/60)/фасад с мембраной из ПТФЭ на стальной конструкции - Конструктивная система:
Консольный железобетонный ствол на ростверке
(- 32 м) - Использованная стратегия демпфирования:
Гибридная массовая система демпфирования (240 т)

1.0 Введение/история
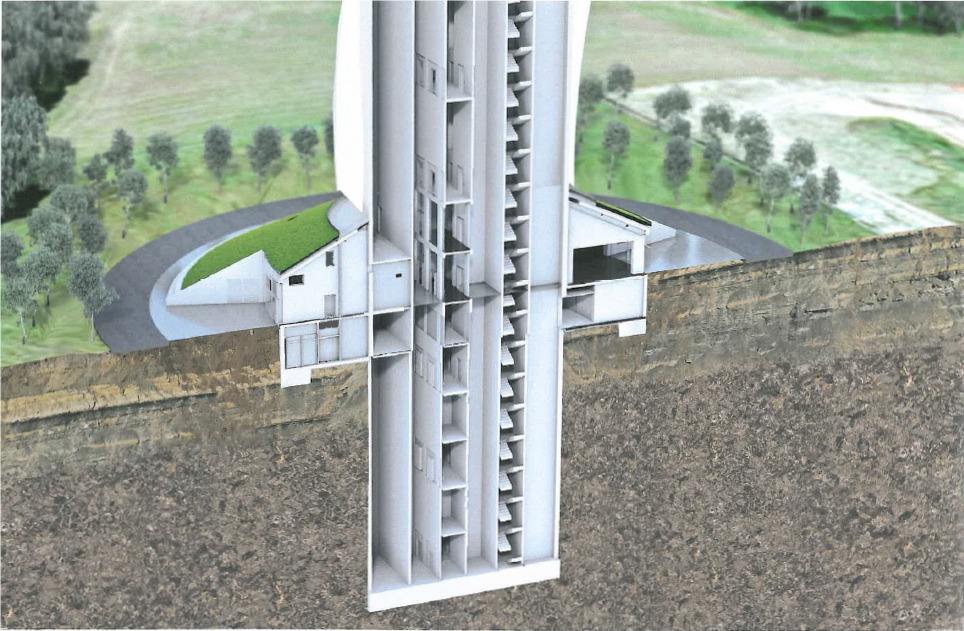
Высотное здание (высотой 246 м) возведено на юго-западе Германии с целью испытаний инновационных лифтов. Башня имеет круглое основание диаметром 20 м и предоставляет место для 9 испытательных лифтовых шахт, пожарного лифта и стеклянного лифта с панорамным обзором. Кроме того, предусмотрено смещение на 220 м для использования в качестве механической подъемной шахты для программ испытаний.
Основание башни имеет диаметр 40 м, чтобы обеспечить дополнительное пространство для сервисной инфраструктуры, холла и образовательного центра. Со смотровой площадки на высоте 232 м — самой высокой в Германии — открывается захватывающий вид на Шварцвальд, а в ясные дни даже на Альпы.

2.0 Конструктивная система
Конструктивная система испытательной башни представляет собой железобетонную трубу диаметром 20,8 м, которая вдавлена в окружающий грунт на глубину 30 м (см. рис. 2). До уровня 110 м труба имеет толщину 40 см, а выше — 25 см. Грунт, состоящий из слоя верхнего триаса и лежащего под ним ракушечного известняка, обеспечивает высокую несущую способность, поэтому свайный фундамент не потребовался. В дополнение к зажиму окружающей почвой, широкая конструкция основания башни обеспечивает дополнительную боковую жесткость.
Внутреннее усиление бетонной трубы осуществляется в основном за счет внутренних стенок лифтовых шахт. Для доступа к лифтовым шахтам на некоторых уровнях высоты были установлены сборные потолочные плиты. Некоторые лифтовые шахты заканчиваются на уровне 115 м и перекрыты отлитыми на месте пролетными полами толщиной 40 см. Эти полы используются для офисных помещений. Надпустотное пространство до отметки 197 м используется в качестве теплового резервуара и для системы инерционного виброгашения (TMD). Верх башни используется для офисных помещений и остальных лифтовых шахт.
Отличительной особенностью испытательной башни является текстильный фасад, состоящий из стекловолоконной сетки с тефлоновым покрытием. Ширина апертуры сетки увеличивается с высотой здания, увеличивая прозрачность фасада, уменьшая плотность и вес материала и создавая аэродинамические эффекты.
Спиральная форма фасада предназначена для использования в качестве спирали Скратона, а сама ткань помогает затенить бетонную конструкцию в целях предотвращения тепловых напряжений, вызываемых солнечным излучением. При проектировании фасада и выборе материалов для установки необходимо было учитывать потребности в техническом обслуживании и долговечность, а также ветровую нагрузку.
3.0 Методика строительства

Строительство испытательной башни включало следующие этапы:
- Подготовка 30-метрового круглого котлована для основания башни Земляные работы с получением нужной формы выполнялись с использованием первоначального взрыва. После земляных работ котлован был закреплен грунтовыми анкерами с торкрет-бетонной облицовкой.
- Заливка ростверка
- Строительство вертикальной бетонной конструкции с использованием скользящей опалубки Все стены возводились непрерывно в течение 4 месяцев
- Установка плит перекрытия
- Строительство входной зоны.
4.0 Прогнозируемая динамическая реакция на ветровую нагрузку
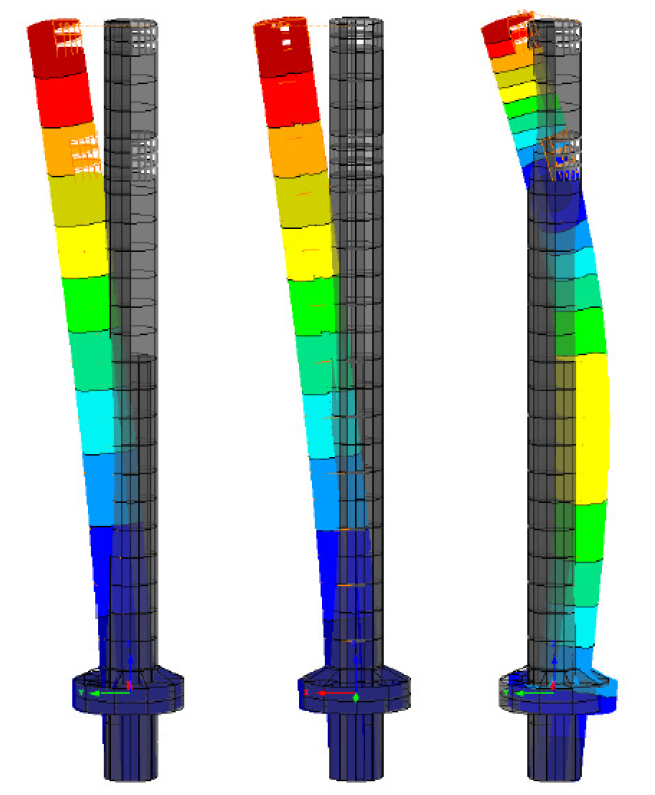
Согласно прогнозу, частоты собственных колебаний испытательной башни будут находиться в диапазоне 0,17–0,20 Гц в зависимости от стадии строительства и состояния бетона (ломаный/неломаный) — см. рис. 4.
Анализ ветровой нагрузки показал, что резонансное возбуждение конструкции возможно при скоростях ветра, соответствующих наземным значениям (на высоте 10 м) в диапазоне 55–60 км/ч. Ожидалось, что без дополнительного демпфирования это резонансное возбуждение приведет к прогибу верхней части примерно на +/- 750 мм, что не только вызовет дискомфорт для пассажиров, но и будет иметь значительные последствия для усталостной прочности бетонной конструкции башни (см. рис. 5). Для уменьшения динамической реакции на боковую ветровую нагрузку была реализована пассивная система инерционного виброгашения. Поскольку башня будет использоваться в качестве испытательной башни для строительства лифтового оборудования, чувствительного к раскачиванию, владелец искал возможность
искусственного возбуждения нагрузки на башню в безветренные дни со смещениями, которые не вызывают проблем с усталостной прочностью. Требуемый уровень искусственного раскачивания находился в безопасном диапазоне примерно +/- 200 мм. Этот запрос дал редкую возможность реализовать систему гибридного виброгашения (HMD) или (поскольку проектная система отличается от других систем HMD, созданных в прошлом) так называемую систему инерционного виброгашения (TMD) двойного назначения. Система будет представлена в следующих главах, где будут рассмотрены оптимизация пассивной системы, конструкция исполнительного механизма, алгоритмы управления и система безопасности.

5.0 Оптимизация пассивной системы инерционного виброгашения
Параметры пассивной системы инерционного виброгашения (TMD) определялись с учетом трех аспектов: а) обеспечение достаточного дополнительного структурного демпфирования для уменьшения динамической реакции из-за возбуждения вихреобразования, b) ограничение результирующего перемещения основной массы TMD в пассивной моде до достижимого/практически целесообразного значения при возбуждении порывами бокового ветра и c) выбор массы TMD в соответствии с подводимой энергией, которая требуется для желаемого максимального отклонения башни в моде возбуждения, с учетом рабочего диапазона, обеспечиваемого предоставленными исполнительными механизмами.
(т. е. максимального создаваемого усилия и максимального хода во время работы). Для оптимизации системы TMD использовалась численная модель, которая представляла распределение массы башни и моменты инерции масс, указанные в заявленных конструктивных характеристиках. Элементы жесткости между этажами также были адаптированы к формам мод и частотам собственных колебаний по результатам полномасштабных наблюдений. На рис. 6 слева показаны формы мод и частоты собственных колебаний согласно используемой аналоговой модели. На рис. 6 слева также сравниваются формы мод аналоговой модели с подробной моделью, подготовленной строительным консультантом.
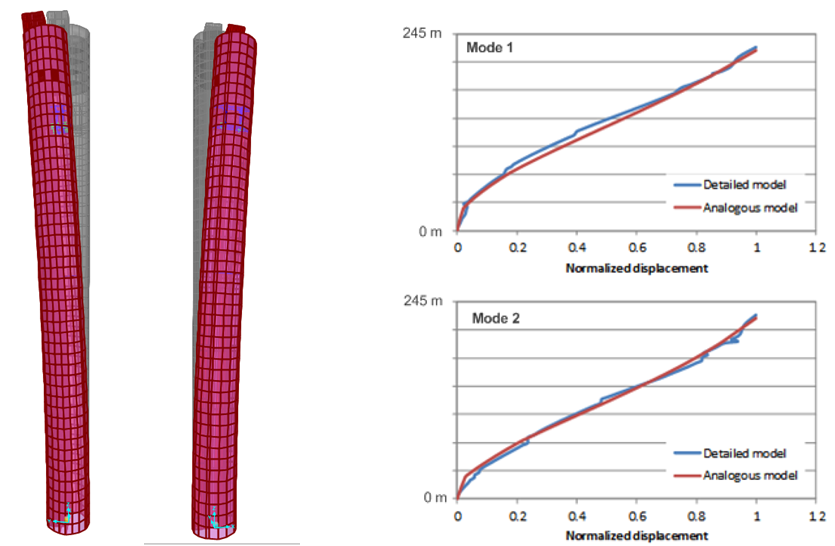
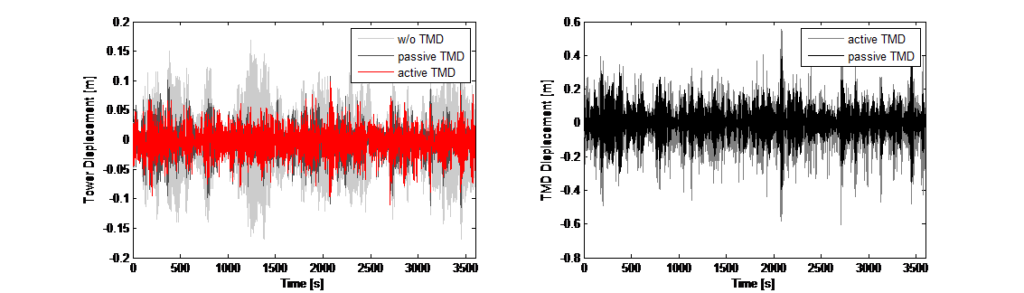
Кроме того, система TMD была дискретно смоделирована как маятниковая система с учетом ее эксцентрического положения на башне. Характеристики нагрузки для основного входного случая, т. е. резонансного возбуждения из-за вихреобразования, очень похожи на характеристики одногармонического возбуждения. Тем не менее, сосуществующая нагрузка порывов ветра по своей природе имеет стохастический характер, и для нее применимы критерии оптимизации, отличные от хорошо известного критерия Дена Хартога. Кроме того, относительные смещения массы ТMD при стохастической нагрузке больше, чем при гармонической. Поскольку для численного определения оптимальных параметров TMD следует учитывать нагрузку, близкую к реальной, был сгенерирован временной график, включающий как стохастическую нагрузку порывов ветра (на основе спектра Давенпорта), так и наложенную резонансную вихреобразную составляющую для представления общего поперечного ветрового возбуждения (см. рис. 3 справа). Уменьшение прогиба башни, которое может быть достигнуто с помощью оптимизированной пассивной системы TMD, а также результирующие смещения TMD показаны на рис. 3 справа.
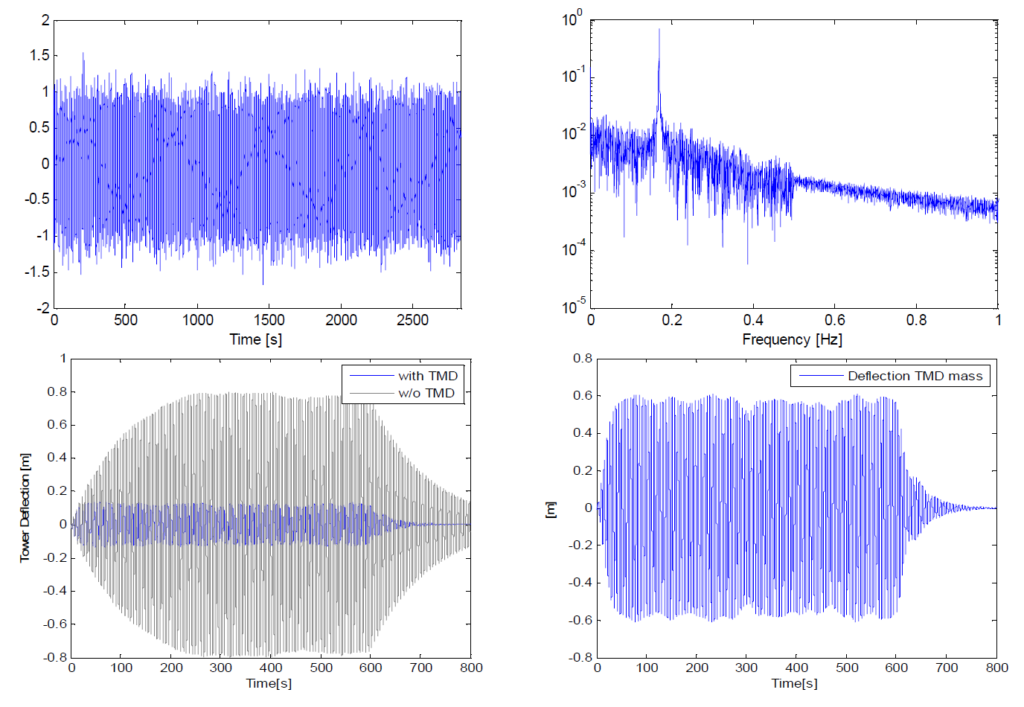
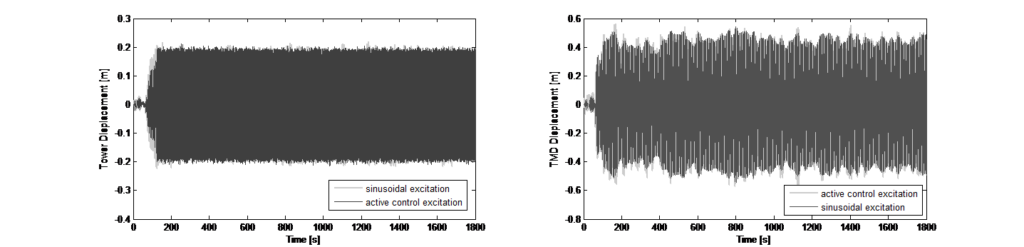
На основании этих результатов для предполагаемого внутреннего коэффициента конструкционного демпфирования ξ = 0,8 % было определено, что для удержания смещения в пределах +/- 650 мм при сохранении оптимального коэффициента демпфирования TMD для достижения наилучших характеристик TMD требуется масса TMD 240 т. Увеличение демпфирования TMD могло бы уменьшить перемещение, при этом эффективность оставалась бы достаточной, но это отрицательно повлияло бы на требования к усилию исполнительного механизма. С целью определения требуемых усилий для оптимальной конфигурации TMD 240 т использовалась аналоговая модель для проверки того, что при максимальном усилии 40 кН от исполнительных механизмов можно достичь прогиба башни в диапазоне +/- 200 мм. На рис. 4 показаны результаты численного моделирования во временной области на аналоговой числовой модели; для этого отображаются результирующие отклонения вершины башни, отклонения массы TMD и вызывающие их входные активные силы.


6.0 Описание системы управления
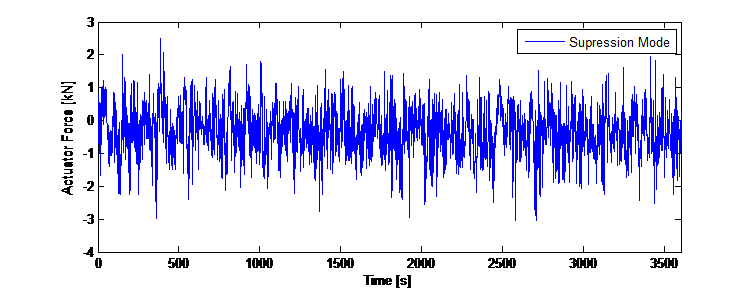
Двойственность системы управления служит для: a) уменьшения энергопотребления при нормальной пассивной работе с целью снижения возникающих вибраций и b) снижения требований к усилию исполнительных механизмов за счет использования резонансных эффектов для возбуждения основной массы TMD для достижения необходимого фактического усилия. Таким образом, по сравнению с другими системами управления (см. рис. 1), исполнительные механизмы соединяют основную конструкцию и массу TMD, но не используются для непосредственного управления массой TMD, как это было бы в случае типичной активной системы инерционного виброгашения/демпфирования.
Для реализуемой системы TMD двойного назначения для пассивной работы была выбрана реактивная масса 240 т. Для рабочей моды возбуждения два линейных привода (по одному в каждом основном направлении) крепятся к массе TMD с помощью шарниров вблизи центра тяжести для предотвращения артефактов кручения. Каждый линейный привод может создавать силы до 40 кН с ходом макс. +/-600 мм (см. рис. 2). Линейные приводы могут отсоединяться, чтобы подшипники исполнительных механизмов не влияли на пассивную моду в маловероятном случае отказа подшипников.
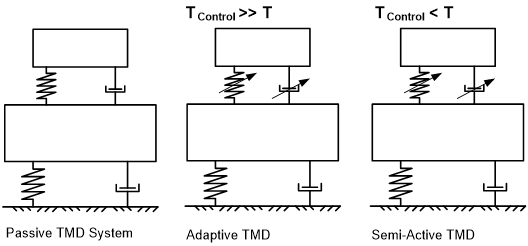
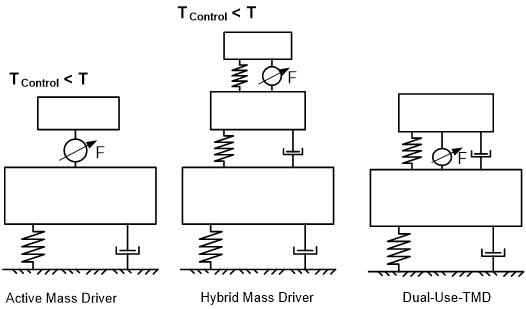
Рис. 10 — Типы систем управления — сравнение системы TMD двойного назначения с пассивными, полуактивными, активными и гибридными системами
Для определения верхнего уровня башни и ускорений массы TMD система оснащена 4 одноосными акселерометрами (сейсмическими акселерометрами K-Beam/MEMS; по одному в каждом направлении). Сигналы ускорения проходят полосовую фильтрацию в диапазоне частот собственных колебаний башни (0,1–0,3 Гц) и интегрируются для определения скоростей и отклонений башни.
Кроме того, интегрированные значения смещения можно сравнивать со значениями дополнительной Глобальной навигационной спутниковой системы, также установленной наверху для сравнения дрейфа сигналов. Соответственно были выполнены исходные корреляционные испытания. Кроме того, перемещения TMD контролируются непосредственно с помощью датчиков положения/скорости и индуктивной системы измерения длины, встроенной в линейные двигатели.
7.0 Алгоритм управления
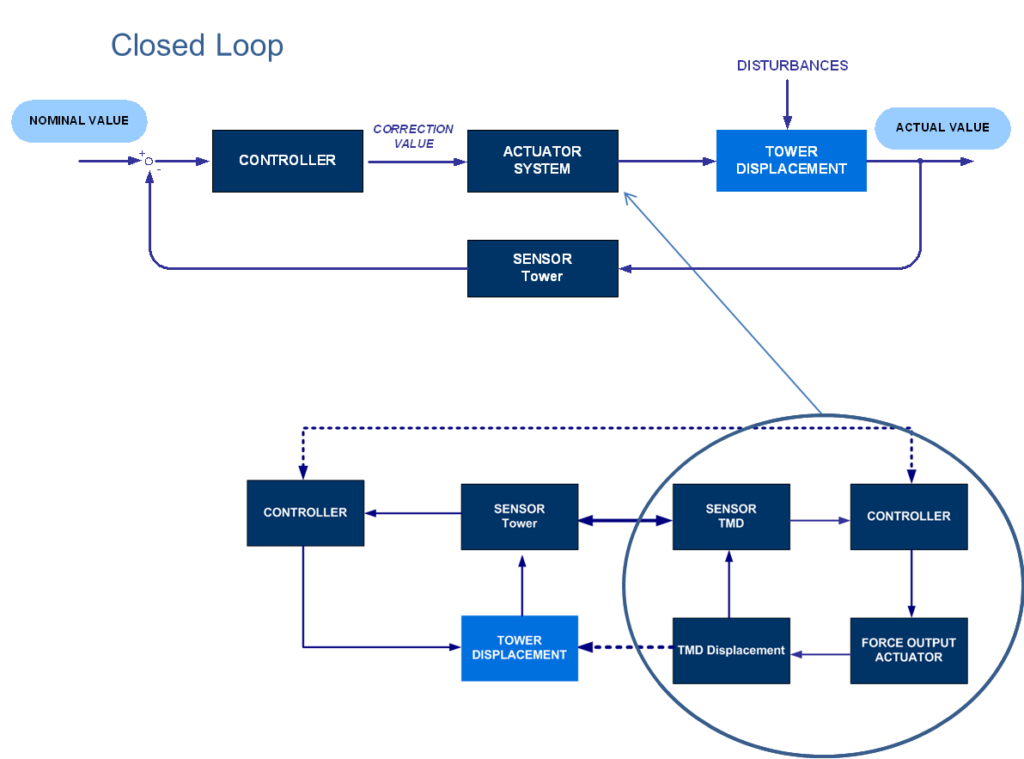
Общий контур управления для башни, показанный на рис. 5, иллюстрирует последовательность управления с обратной связью. Детальная разработка алгоритма управления требует аналитических моделей взаимодействия исполнительных механизмов и массы TMD для определения связи между входным сигналом исполнительного механизма и прилагаемым усилием действия. Они должны сочетаться с аналитической моделью основной конструкции, описывающей общее динамическое поведение здания. Кроме того, в отличие от стандартных алгоритмов управления, которые применялись в других случаях применения HMD, как, например, в [2],[3] или изучались теоретически, как, например, в [1] , алгоритм управления для этого случая применения башни должен был учитывать синхронное управляемое возбуждение в одном основном направлении и уменьшение вибрации в перпендикулярном направлении. Поскольку динамическая реакция по большей части ожидается в основных модах, для обеих этих задач может применяться линейное управление с обратной связью со всеми его преимуществами с точки зрения предотвращения нестабильностей. Для простой практической реализации управления линейное управление с обратной связью, ослабляющее динамическую реакцию башни в направлении, перпендикулярном возбуждению, приводит в действие соответствующий исполнительный механизм посредством заданной взвешенной линейной суммы 7 структурно-динамических измеряемых параметров. Этими измеряемыми параметрами являются: ускорение TMD и вершины башни, скорость TMD и вершины башни, смещения TMD и вершины башни, а также смещение TMD относительно вершины башни.
Важно отметить, что предварительно выбранные весовые коэффициенты представляют собой простые (положительные или отрицательные) скалярные значения усиления. Параметризация весовых коэффициентов основана на динамических испытаниях башни и не использует частотно-зависимую модификацию. Активная обратная связь исполнительного механизма рассчитывается мгновенно (при частоте 50 Гц) и также является линейной комбинацией ранее указанных динамических измеряемых параметров. Нелинейные манипуляции не используются. Для демонстрации эффективности подавления вибраций органов управления исполнительным механизмом схема управления также была реализована в численном моделировании во временной области (т. е. с помощью прямого интегрирования). Для моды возбуждения использовался тот же подход к управлению в сочетании с компенсацией смещения, которая представляет собой возбуждение башни до желаемого значения смещения. Компенсация представляет собой синусоидальную функцию на основе обнаруженной основной частоты по каждому направлению. Выходной сигнал управления для противодействия изменению смещения верхней части из-за других возмущений затем модулируется синусоидальной функцией смещения, и управляющее значение корректируется соответствующим образом.
Линейное управление с обратной связью для уменьшения динамической реакции башни в направлении, перпендикулярном возбуждению, позволяет подавать команду усилия на исполнительный механизм как заданную взвешенную линейную сумму 7 измеряемых динамических параметров. Этими 7 измеряемыми параметрами являются: ускорение TMD и башни, скорость TMD и башни, смещения TMD и башни, а также смещение TMD относительно башни. Важно отметить, что предварительно выбранные весовые коэффициенты представляют собой простые (положительные или отрицательные) скалярные значения усиления. Параметризация весового коэффициента основана на экспериментальных динамических испытаниях башни. Обратная связь исполнительного механизма рассчитывается мгновенно (при частоте 50 Гц)
, а весовые коэффициенты представляют собой скалярные значения, которые не используют каких-либо частотно-зависимых функций переноса. Кроме того, обратная связь представляет собой линейную комбинацию динамических характеристик. Нелинейные манипуляции или логики не используются. Схема управления также была реализована в численном моделировании во временной области (т. е. с помощью прямого интегрирования), поэтому для каждого временного шага в качестве управления исполнительным механизмом можно адаптировать усилие, подводимое к массе TMD. На рис. 12 показаны результаты моделирования для подавления вибраций — смещения башни и результирующее перемещение массы TMD.
Для моды возбуждения использовался тот же подход к управлению в сочетании с компенсацией, которая представляет собой возбуждение башни до желаемого значения смещения. Компенсация представляет собой синусоидальную функцию на основе обнаруженной основной частоты по каждому направлению. Выходной сигнал управления для противодействия изменению смещения верхней части из-за других возмущений затем модулируется синусоидальной функцией
смещения, и управляющее значение корректируется соответствующим образом. Для этой компенсации был экспериментально определен весовой коэффициент. На рис. 13 представлены численные результаты с возмущением порывистых нагрузок для моды возбуждения с простым синусоидальным возбуждением и примененным алгоритмом управления.
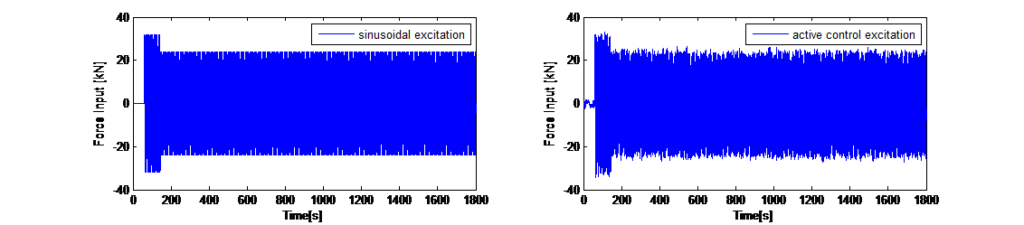
8.0 Концепция безопасности
С учетом усилия +/- 40 кН, которое может быть обеспечено линейными приводами, используемыми в качестве исполнительных механизмов, необходима система безопасности, гарантирующая, что смещения башни не превышают пределов усталости. Это требование применимо даже в том случае, если выходное усилие недостаточно для того, чтобы вызвать прогиб верхней части больше заданного значения +/- 200 мм. Одним из подходов к повышению безопасности системы было увеличение избыточности датчиков контроля, регистрирующих отклонение верхней части башни. Лучше всего этого можно достичь с помощью дополнительной независимой системы мониторинга, которая в идеале использует принцип измерения, отличный от фактически используемого контрольным оборудованием. Как уже говорилось, для представленного здесь проекта контрольное оборудование использовало акселерометр и заданный порог ускорения для полосовой фильтрации сигналов в диапазоне соответствующих частот собственных колебаний конструкции. Главной системой мониторинга высшего уровня является Глобальная навигационная спутниковая система (ГНСС), имеющая точность +/- 10 мм.
ГНСС требуется базовая станция, которая преобразует данные координат в фактические значения реакции смещения. Если смещение вершины башни превысит заданный порог в моде искусственного возбуждения (что может быть связано с дополнительным ветром или другим возбуждением), реле переключит сигнал присутствия на 0 В. Это приведет к прерыванию моды возбуждения. Кроме того, обе системы мониторинга постоянно проверяют полученные данные на наличие ошибочных сигналов датчиков, что также приводит к прерыванию активной моды возбуждения. Ошибочные сигналы акселерометра/датчика положения/скорости обнаруживаются по критерию выделения спектральных пиков — допускается, что датчики выдают достоверные сигналы, только если в соответствующем диапазоне возможно выделение пиков. Система ГНСС анализирует изменение координатных данных, и если выборочные данные не меняются своевременно, автоматически предполагается ошибочный сигнал.
9.0 Вибрационные испытания
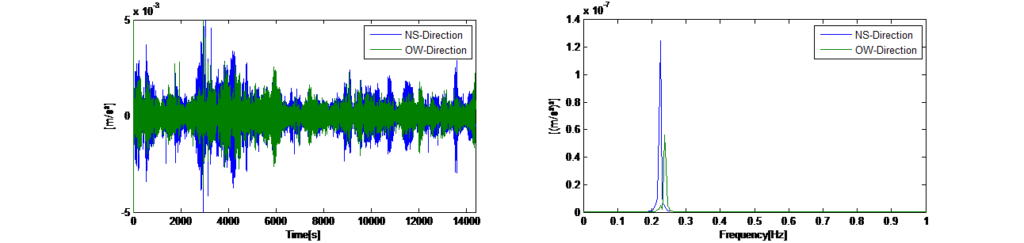
На текущем этапе проведены исходные вибрационные испытания башни, когда строительство еще не завершено, поэтому основные частоты башни на этом этапе превышают заданный диапазон настройки пассивной системы TMD. TMD настраивается на максимально возможную частоту настройки. Целью вибрационных испытаний было определение основных частот башни с заблокированной системой TMD, а также собственного конструкционного демпфирования. Кроме того, необходимо определить динамическое поведение с включенной пассивной системой TMD, а также увеличение конструкционного демпфирования благодаря пассивной системе TMD. Для определения основных частот собственных колебаний башни может использоваться [1] метод усредненной нормализованной спектральной плотности энерговыделения (ANPSD). Для этого записанные временные истории должны быть разделены на сегменты. Эти сегменты должны быть преобразованы в частотную область. Полученные спектры необходимо нормализовать, усреднить и умножить на комплексно-сопряженные спектры.
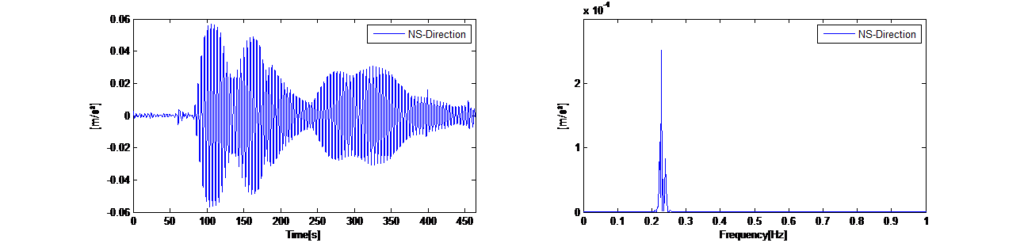
Благодаря этому вся случайная вибрация будет устранена, а в усредненном спектре, который теперь представляет собой преимущественно возбуждаемые собственные частоты башни, будут отображаться только повторяющиеся свободные колебания конструкции. На рис. 14 слева показаны записанные временные графики горизонтальных колебаний окружающей среды в направлениях x и y с заблокированной системой TMD. На рис. 14 справа показаны результирующие усредненные энергетические спектры для сегмента продолжительностью 120 с. Спектры показывают, что башня демонстрирует динамическую реакцию на двух доминирующих частотах (0,225 Гц в направлении x и 0,245 Гц в направлении y).
В дополнение к вышеописанному методу усредненного энергетического спектра (который предполагает, что внешнее возбуждение вызывает достаточную динамическую реакцию в рассматриваемых модах вибрации для обеспечения стохастической безопасности), собственные частоты были определены с использованием коммерческого ПО для обработки сигналов ARTEMIS, [1] которое включает методы расширенной декомпозиции в частотной области и стохастической идентификации подпространства.
Методы расширенной декомпозиции в частотной области (EFDD) и стохастической идентификации подпространства являются широко используемыми методами идентификации выходных модальных параметров.
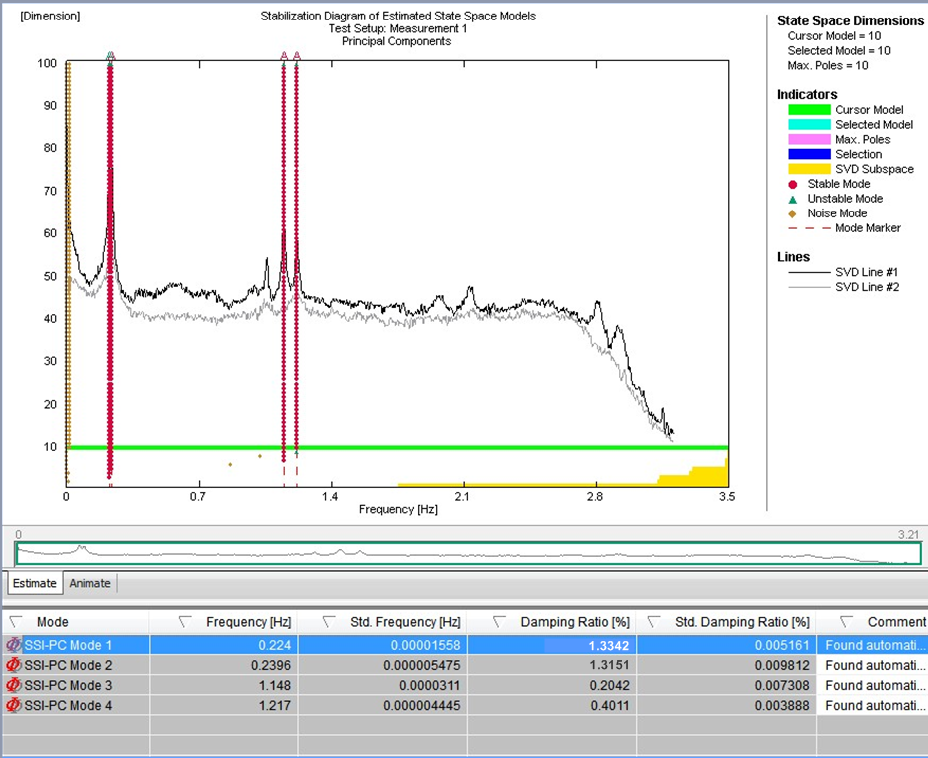
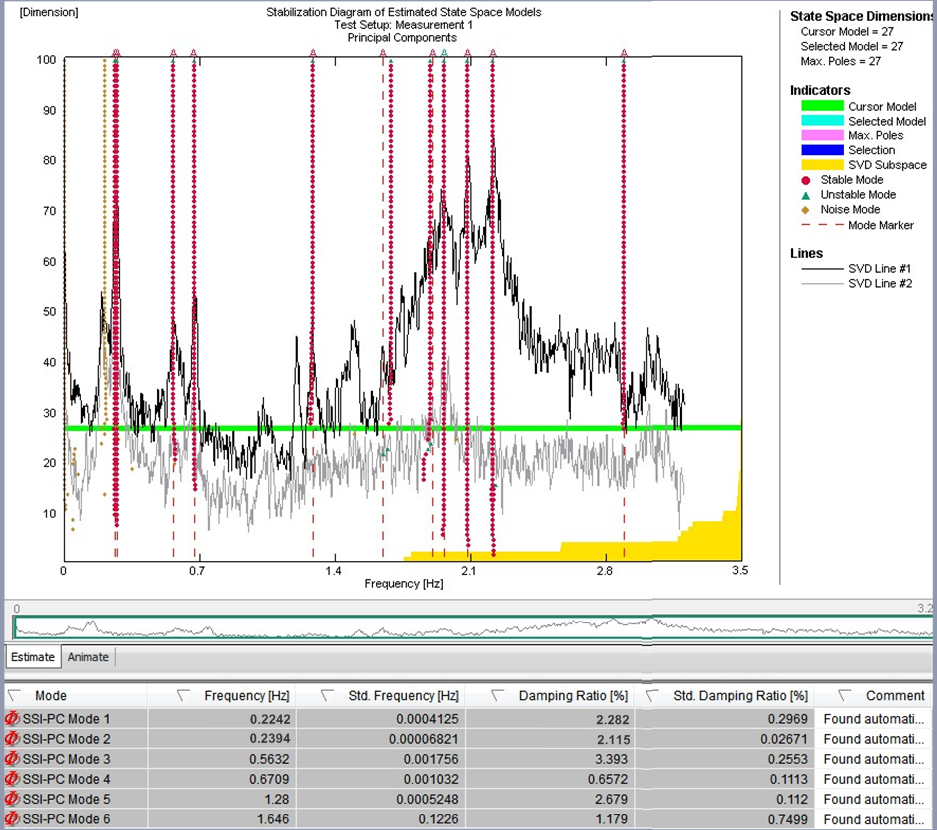
Рис. 15 — Карты стабильности для регистрации вибраций в окружающей среде с заблокированной системой TMD (слева) и активированной системой TMD (справа)
Метод EFDD основан на расчете спектров реакции. Поэтому для уменьшения погрешности при оценке спектра и надежного получения модальных параметров необходимы длительные записи. Для идентификации мостов с использованием модели выходных параметров был применен алгоритм стохастической идентификации подпространства. Методы стохастической идентификации подпространства работают во временной области и основаны на описании пространства состояний динамической проблемы. Результаты идентификации системы на различных уровнях модели сравниваются, чтобы отличить истинные структурные моды от ложных мод на так называемых стабилизационных диаграммах. Эти диаграммы представляют собой популярный способ выбора идентифицированной модели системы, поскольку истинные структурные моды имеют тенденцию быть стабильными для последовательных уровней модели, удовлетворяя определенным критериям стабилизации, которые оцениваются в рамках автоматизированной процедуры. На рис. 15 показана результирующая карта стабильности для зарегистрированных данных об окружающей среде, по которой можно определить действующие моды. Идентифицированные моды и определенные коэффициенты демпфирования для каждой моды в состоянии с заблокированной системой TMD (слева) и активированной системой TMD (справа) также показаны на рис. 14. Можно заметить увеличение конструкционного демпфирования. Дополнительное конструкционное демпфирование находится в диапазоне теоретических значений, который может быть определен из теоретической модели, для которой рассматривалась расстроенная система TMD.
Помимо испытаний на вибрацию окружающей среды, в пассивной системе ДПВ проводились предварительные испытания с активной модой возбуждения, несмотря на расстроенное состояние системы ДПВ. На рис. 12 слева показан временной график зарегистрированных ускорений на вершине башни. После начального синусоидального возбуждения был активирован алгоритм для постоянного уровня ускорения с целью экспериментального определения корреляции между отклонением башни и вынужденным смещением массы ТМД. Временной график на рис. 12 демонстрирует два тестовых сценария в моде возбуждения, а соответствующие спектры БПФ показывают четкую реакцию башни на двух ее основных частотах (в направлениях x и y). Во временном интервале, выделенном зеленым цветом, имеется синусоидальное возбуждение массы с отключенным активным управлением, вызывающим динамическую реакцию в обоих основных направлениях. Результирующий спектр БПФ отображает два пика для определения основных частот в этих двух направлениях. Во временном интервале, выделенном синим цветом, имеется возбуждение с включенным активным управлением, вызывающим более устойчивое смещение башни преимущественно в одном направлении. Результирующее затухание вибрации после выключения моды возбуждения также использовалось для определения конструкционного демпфирования; результат был определен равным D=2,4 %. Этот результат соответствует коэффициенту демпфирования, определенному с помощью алгоритмов SSI.
10.0 Заключение и перспективы
Система TMD двойного назначения установлена на испытательной башне Thyssen Krupp высотой 246 м с целью преднамеренного возбуждения башни до контролируемой динамической реакции на ее основных частотах. Целью этого возбуждения является достижение определенного колебания здания в двух основных направлениях башни. На основе численных расчетов было установлено, что для достижения необходимого дополнительного демпфирования для пассивной моды и создания необходимого управляющего усилия для достижения смещения верха башни +/- 200 мм требуется масса TMD 240 т. Для создания постоянного уровня смещения для моды возбуждения и подавления перемещений, вызванных ветром и компонентом вынужденной вибрации в перпендикулярном направлении, с помощью численного моделирования был разработан и апробирован алгоритм управления. После установки пассивной системы TMD маятникового типа, для которой в качестве реакционной массы использовались сборные железобетонные плиты, были введены в эксплуатацию исполнительные механизмы и проведены первоначальные испытания. Испытания показали, что собственное демпфирование башни было выше, чем ожидалось, однако все действующие моды можно было четко определить. Активная мода возбуждения здания работает и может быть протестирована, хотя и не в полной мере для получения всех параметров работы, так как строительство здания еще не завершено. Из-за недостроенного состояния здания пассивная система TMD не могла быть адаптирована к определенным основным частотам.
Как только система TMD будет адаптирована, будут проведены дальнейшие испытания здания, которые также будут включать испытания амплитудно-зависимого демпфирования и целостности системы безопасности.
ССЫЛКИ
[1] Wenzel, H., Pichler, D., Schedler, R. (1991). „Ambiente Schwingungsmessungen zur System und Schadenserkennung an Tragwerken“, Bauingenieur 74
[2] Döhler, M., Andersen, P.: Mevel, L. (2012). “Operational Modal Analysis using a Fast Stochastic Subspace Identification Method”, Conference Proceedings of the Society for Experimental Mechanics Series
[3] Soong, T.T., Spencer, J.R. (2000). “Active, Semi-Active and hybrid control of structures” In 12th World Conference for Earthquake Engineering
[4] Ricciardelli, F.; Pizzimenti, A.D.; Mattei, M. (2003). Passive and active mass damper control of the response of tall buildings to wind gustiness. Eng. Struct., 25, 1199–1209
[5] Yang, N.Y.; Agrawal, A.K.; Samali, B.; Wu, J.C. Benchmark Problem for Response Control of Wind-Excited Tall Buildings. J. Eng. Mech. 2004, 130, 437–446.
[6] Watakabe, M.; Tohdp, M.; Chiba, O.; Izumi, N.; Ebisawa, H.; Fujita, T. Response control performance of a hybrid mass damper applied to a tall building. Earthq. Eng. Struct. Dyn. 2001, 30, 1655–1676.
[7] Tan, P.; Liu, Y.; Zhou, F.; Teng, J. Hybrid Mass Dampers for Canton Tower. CTBUH J. 2012, 24–29.
[8] Soong, T.T. “Active Structural Control: Theory and Practice”; John Wiley & Sons, Inc.: New York, NY, USA, 1990
[9] Preumont, A., Kazuto, S. (2008).”Active Control of Structures”, Wiley, Padstow
Поделиться этим постом






Другие ресурсы
Вам нужна дополнительная информация по этой теме?
Просим вас без колебаний обращаться к нам со своим вопросом.
Один из наших проектных инженеров свяжется с вами в ближайшее время.
Практический пример технологий демпфирования для высотных зданий: Комфорт и безопасность
Совет по высотным зданиям и городской среде (CTBUH) — руководство по системе демпфирования
Испытательная башня Thyssen Krupp, Ротвайль (Германия)
Данные проекта
- Год реализации:
2016 (завершение строительства) - Девелопер/подрядчик/владелец:
Krupp Hoesch Stahl GmbH/Thyssen Krupp Elevators - Архитектурный проект:
Werner Sobek совместно с JAHN Architects Stuttgart and Chicago - Конструкционный проект:
Werner Sobek Stuttgart - Поставщик решения по демпфированию:
GERB Vibration Control Systems - Испытательная лаборатория:
Wacker Ingenieure (проектирование систем ветрозащиты/испытания в аэродинамической трубе) - Высота/межэтажная высота:
246 м/3,3 м (офисное пространство) - Этажи:
Офисное пространство на 27 уровней/8 этажей - Общая площадь башни:
340 кв. м - Функция здания:
Башня для испытаний лифтов/офисы/смотровая площадка (232 м) - Использованная стратегия демпфирования:
Гибридная массовая система демпфирования (240 т)
- Конструкционный материал:
Железобетон (C50/60)/фасад с мембраной из ПТФЭ на стальной конструкции - Конструктивная система:
Консольный железобетонный ствол на ростверке
(- 32 м)
Практический пример технологий демпфирования для высотных зданий: Комфорт и безопасность
Совет по высотным зданиям и городской среде (CTBUH) — руководство по системе демпфирования
Испытательная башня Thyssen Krupp, Ротвайль (Германия)
Данные проекта
- Год реализации: 2016 (завершение строительства)
- Девелопер/подрядчик/владелец: Krupp Hoesch Stahl GmbH/Thyssen Krupp Elevators
- Архитектурный проект: Werner Sobek совместно с JAHN Architects Stuttgart and Chicago
- Конструкционный проект: Werner Sobek Stuttgart
- Поставщик решения по демпфированию: GERB Vibration Control Systems
- Испытательная лаборатория: Wacker Ingenieure (проектирование систем ветрозащиты/испытания в аэродинамической трубе)
- Высота/межэтажная высота: 246 м/3,3 м (офисное пространство)
- Этажи: Офисное пространство на 27 уровней/8 этажей
- Общая площадь башни: 340 кв. м
- Функция здания: Башня для испытаний лифтов/офисы/смотровая площадка (232 м)
- Конструкционный материал: Железобетон (C50/60)/фасад с мембраной из ПТФЭ на стальной конструкции
- Конструктивная система: Консольный железобетонный ствол на ростверке (-32 м)
- Использованная стратегия демпфирования: Гибридная массовая система демпфирования (240 т)
1.0 Введение/история
Высотное здание (высотой 246 м) возведено на юго-западе Германии с целью испытаний инновационных лифтов. Башня имеет круглое основание диаметром 20 м и предоставляет место для 9 испытательных лифтовых шахт, пожарного лифта и стеклянного лифта с панорамным обзором. Кроме того, предусмотрено смещение на 220 м для использования в качестве механической подъемной шахты для программ испытаний.
Основание башни имеет диаметр 40 м, чтобы обеспечить дополнительное пространство для сервисной инфраструктуры, холла и образовательного центра. Со смотровой площадки на высоте 232 м — самой высокой в Германии — открывается захватывающий вид на Шварцвальд, а в ясные дни даже на Альпы.
2.0 Конструктивная система
Конструктивная система испытательной башни представляет собой железобетонную трубу диаметром 20,8 м, которая вдавлена в окружающий грунт на глубину 30 м (см. рис. 2). До уровня 110 м труба имеет толщину 40 см, а выше — 25 см. Грунт, состоящий из слоя верхнего триаса и лежащего под ним ракушечного известняка, обеспечивает высокую несущую способность, поэтому свайный фундамент не потребовался. В дополнение к зажиму окружающей почвой, широкая конструкция основания башни обеспечивает дополнительную боковую жесткость.
Внутреннее усиление бетонной трубы осуществляется в основном за счет внутренних стенок лифтовых шахт. Для доступа к лифтовым шахтам на некоторых уровнях высоты были установлены сборные потолочные плиты. Некоторые лифтовые шахты заканчиваются на уровне 115 м и перекрыты отлитыми на месте пролетными полами толщиной 40 см. Эти полы используются для офисных помещений. Надпустотное пространство до отметки 197 м используется в качестве теплового резервуара и для системы инерционного виброгашения (TMD). Верх башни используется для офисных помещений и остальных лифтовых шахт.
Отличительной особенностью испытательной башни является текстильный фасад, состоящий из стекловолоконной сетки с тефлоновым покрытием. Ширина апертуры сетки увеличивается с высотой здания, увеличивая прозрачность фасада, уменьшая плотность и вес материала и создавая аэродинамические эффекты.
Спиральная форма фасада предназначена для использования в качестве спирали Скратона, а сама ткань помогает затенить бетонную конструкцию в целях предотвращения тепловых напряжений, вызываемых солнечным излучением. При проектировании фасада и выборе материалов для установки необходимо было учитывать потребности в техническом обслуживании и долговечность, а также ветровую нагрузку.
3.0 Методика строительства
Строительство испытательной башни включало следующие этапы:
- Подготовка 30-метрового круглого котлована для основания башни Земляные работы с получением нужной формы выполнялись с использованием первоначального взрыва. После земляных работ котлован был закреплен грунтовыми анкерами с торкрет-бетонной облицовкой.
- Заливка ростверка
- Строительство вертикальной бетонной конструкции с использованием скользящей опалубки Все стены возводились непрерывно в течение 4 месяцев
- Установка плит перекрытия
- Строительство входной зоны.
4.0 Прогнозируемая динамическая реакция на ветровую нагрузку
Согласно прогнозу, частоты собственных колебаний испытательной башни будут находиться в диапазоне 0,17–0,20 Гц в зависимости от стадии строительства и состояния бетона (ломаный/неломаный) — см. Рис. 4.
Анализ ветровой нагрузки показал, что резонансное возбуждение конструкции возможно при скоростях ветра, соответствующих наземным значениям (на высоте 10 м) в диапазоне 55–60 км/ч. Ожидалось, что без дополнительного демпфирования это резонансное возбуждение приведет к прогибу верхней части примерно на +/- 750 мм, что не только вызовет дискомфорт для пассажиров, но и будет иметь значительные последствия для усталостной прочности бетонной конструкции башни (см. рис. 5). Для уменьшения динамической реакции на боковую ветровую нагрузку была реализована пассивная система инерционного виброгашения. Поскольку башня будет использоваться в качестве испытательной башни для строительства лифтового оборудования, чувствительного к раскачиванию, владелец искал возможность искусственного возбуждения нагрузки на башню в безветренные дни со смещениями, которые не вызывают проблем с усталостной прочностью. Требуемый уровень искусственного раскачивания находился в безопасном диапазоне примерно +/- 200 мм. Этот запрос дал редкую возможность реализовать систему гибридного виброгашения (HMD) или (поскольку проектная система отличается от других систем HMD, созданных в прошлом) так называемую систему инерционного виброгашения (TMD) двойного назначения. Система будет представлена в следующих главах, где будут рассмотрены оптимизация пассивной системы, конструкция исполнительного механизма, алгоритмы управления и система безопасности.
5.0 Оптимизация пассивной системы инерционного виброгашения
Параметры пассивной системы инерционного виброгашения (TMD) определялись с учетом трех аспектов: а) обеспечение достаточного дополнительного структурного демпфирования для уменьшения динамической реакции из-за возбуждения вихреобразования, b) ограничение результирующего перемещения основной массы TMD в пассивной моде до достижимого/практически целесообразного значения при возбуждении порывами бокового ветра и c) выбор массы TMD в соответствии с подводимой энергией, которая требуется для желаемого максимального отклонения башни в моде возбуждения, с учетом рабочего диапазона, обеспечиваемого предоставленными исполнительными механизмами (т. е. максимального создаваемого усилия и максимального хода во время работы). Для оптимизации системы TMD использовалась численная модель, которая представляла распределение массы башни и моменты инерции масс, указанные в заявленных конструктивных характеристиках. Элементы жесткости между этажами также были адаптированы к формам мод и частотам собственных колебаний по результатам полномасштабных наблюдений. На рис. 6 слева показаны формы мод и частоты собственных колебаний согласно используемой аналоговой модели. На рис. 6 слева также сравниваются формы мод аналоговой модели с подробной моделью, подготовленной строительным консультантом.
Кроме того, система TMD была дискретно смоделирована как маятниковая система с учетом ее эксцентрического положения на башне. Характеристики нагрузки для основного входного случая, т. е. резонансного возбуждения из-за вихреобразования, очень похожи на характеристики одногармонического возбуждения. Тем не менее, сосуществующая нагрузка порывов ветра по своей природе имеет стохастический характер, и для нее применимы критерии оптимизации, отличные от хорошо известного критерия Дена Хартога. Кроме того, относительные смещения массы ТMD при стохастической нагрузке больше, чем при гармонической. Поскольку для численного определения оптимальных параметров TMD следует учитывать нагрузку, близкую к реальной, был сгенерирован временной график, включающий как стохастическую нагрузку порывов ветра (на основе спектра Давенпорта), так и наложенную резонансную вихреобразную составляющую для представления общего поперечного ветрового возбуждения (см. рис. 3 справа). Уменьшение прогиба башни, которое может быть достигнуто с помощью оптимизированной пассивной системы TMD, а также результирующие смещения TMD показаны на рис. 3 справа.
На основании этих результатов для предполагаемого внутреннего коэффициента конструкционного демпфирования ξ = 0,8 % было определено, что для удержания смещения в пределах +/- 650 мм при сохранении оптимального коэффициента демпфирования TMD для достижения наилучших характеристик TMD требуется масса TMD 240 т. Увеличение демпфирования TMD могло бы уменьшить перемещение, при этом эффективность оставалась бы достаточной, но это отрицательно повлияло бы на требования к усилию исполнительного механизма. С целью определения требуемых усилий для оптимальной конфигурации TMD 240 т использовалась аналоговая модель для проверки того, что при максимальном усилии 40 кН от исполнительных механизмов можно достичь прогиба башни в диапазоне +/- 200 мм. На рис. 4 показаны результаты численного моделирования во временной области на аналоговой числовой модели; для этого отображаются результирующие отклонения вершины башни, отклонения массы TMD и вызывающие их входные активные силы.
6.0 Описание системы управления
Двойственность системы управления служит для: a) уменьшения энергопотребления при нормальной пассивной работе с целью снижения возникающих вибраций и b) снижения требований к усилию исполнительных механизмов за счет использования резонансных эффектов для возбуждения основной массы TMD для достижения необходимого фактического усилия. Таким образом, по сравнению с другими системами управления (см. рис. 1), исполнительные механизмы соединяют основную конструкцию и массу TMD, но не используются для непосредственного управления массой TMD, как это было бы в случае типичной активной системы инерционного виброгашения/демпфирования.
Для реализуемой системы TMD двойного назначения для пассивной работы была выбрана реактивная масса 240 т. Для рабочей моды возбуждения два линейных привода (по одному в каждом основном направлении) крепятся к массе TMD с помощью шарниров вблизи центра тяжести для предотвращения артефактов кручения. Каждый линейный привод может создавать силы до 40 кН с ходом макс. +/-600 мм (см. рис. 2). Линейные приводы могут отсоединяться, чтобы подшипники исполнительных механизмов не влияли на пассивную моду в маловероятном случае отказа подшипников.
Рис. 10 — Типы систем управления — сравнение системы TMD двойного назначения с пассивными, полуактивными, активными и гибридными системами
Для определения верхнего уровня башни и ускорений массы TMD система оснащена 4 одноосными акселерометрами (сейсмическими акселерометрами K-Beam/MEMS; по одному в каждом направлении). Сигналы ускорения проходят полосовую фильтрацию в диапазоне частот собственных колебаний башни (0,1–0,3 Гц) и интегрируются для определения скоростей и отклонений башни.
Кроме того, интегрированные значения смещения можно сравнивать со значениями дополнительной Глобальной навигационной спутниковой системы, также установленной наверху для сравнения дрейфа сигналов. Соответственно были выполнены исходные корреляционные испытания. Кроме того, перемещения TMD контролируются непосредственно с помощью датчиков положения/скорости и индуктивной системы измерения длины, встроенной в линейные двигатели.
7.0 Алгоритм управления
Общий контур управления для башни, показанный на рис. 5, иллюстрирует последовательность управления с обратной связью. Детальная разработка алгоритма управления требует аналитических моделей взаимодействия исполнительных механизмов и массы TMD для определения связи между входным сигналом исполнительного механизма и прилагаемым усилием действия. Они должны сочетаться с аналитической моделью основной конструкции, описывающей общее динамическое поведение здания. Кроме того, в отличие от стандартных алгоритмов управления, которые применялись в других случаях применения HMD, как, например, в [2],[3] или изучались теоретически, как, например, в [1] , алгоритм управления для этого случая применения башни должен был учитывать синхронное управляемое возбуждение в одном основном направлении и уменьшение вибрации в перпендикулярном направлении. Поскольку динамическая реакция по большей части ожидается в основных модах, для обеих этих задач может применяться линейное управление с обратной связью со всеми его преимуществами с точки зрения предотвращения нестабильностей. Для простой практической реализации управления линейное управление с обратной связью, ослабляющее динамическую реакцию башни в направлении, перпендикулярном возбуждению, приводит в действие соответствующий исполнительный механизм посредством заданной взвешенной линейной суммы 7 структурно-динамических измеряемых параметров. Этими измеряемыми параметрами являются: ускорение TMD и вершины башни, скорость TMD и вершины башни, смещения TMD и вершины башни, а также смещение TMD относительно вершины башни.
Важно отметить, что предварительно выбранные весовые коэффициенты представляют собой простые (положительные или отрицательные) скалярные значения усиления. Параметризация весовых коэффициентов основана на динамических испытаниях башни и не использует частотно-зависимую модификацию. Активная обратная связь исполнительного механизма рассчитывается мгновенно (при частоте 50 Гц) и также является линейной комбинацией ранее указанных динамических измеряемых параметров. Нелинейные манипуляции не используются. Для демонстрации эффективности подавления вибраций органов управления исполнительным механизмом схема управления также была реализована в численном моделировании во временной области (т. е. с помощью прямого интегрирования). Для моды возбуждения использовался тот же подход к управлению в сочетании с компенсацией смещения, которая представляет собой возбуждение башни до желаемого значения смещения. Компенсация представляет собой синусоидальную функцию на основе обнаруженной основной частоты по каждому направлению. Выходной сигнал управления для противодействия изменению смещения верхней части из-за других возмущений затем модулируется синусоидальной функцией смещения, и управляющее значение корректируется соответствующим образом.
Линейное управление с обратной связью для уменьшения динамической реакции башни в направлении, перпендикулярном возбуждению, позволяет подавать команду усилия на исполнительный механизм как заданную взвешенную линейную сумму 7 измеряемых динамических параметров. Этими 7 измеряемыми параметрами являются: ускорение TMD и башни, скорость TMD и башни, смещения TMD и башни, а также смещение TMD относительно башни. Важно отметить, что предварительно выбранные весовые коэффициенты представляют собой простые (положительные или отрицательные) скалярные значения усиления. Параметризация весового коэффициента основана на экспериментальных динамических испытаниях башни. Обратная связь исполнительного механизма рассчитывается мгновенно (при частоте 50 Гц)
, а весовые коэффициенты представляют собой скалярные значения, которые не используют каких-либо частотно-зависимых функций переноса. Кроме того, обратная связь представляет собой линейную комбинацию динамических характеристик. Нелинейные манипуляции или логики не используются. Схема управления также была реализована в численном моделировании во временной области (т. е. с помощью прямого интегрирования), поэтому для каждого временного шага в качестве управления исполнительным механизмом можно адаптировать усилие, подводимое к массе TMD. На рис. 12 показаны результаты моделирования для подавления вибраций — смещения башни и результирующее перемещение массы TMD.
Для моды возбуждения использовался тот же подход к управлению в сочетании с компенсацией, которая представляет собой возбуждение башни до желаемого значения смещения. Компенсация представляет собой синусоидальную функцию на основе обнаруженной основной частоты по каждому направлению. Выходной сигнал управления для противодействия изменению смещения верхней части из-за других возмущений затем модулируется синусоидальной функцией
смещения, и управляющее значение корректируется соответствующим образом. Для этой компенсации был экспериментально определен весовой коэффициент. На рис. 13 представлены численные результаты с возмущением порывистых нагрузок для моды возбуждения с простым синусоидальным возбуждением и примененным алгоритмом управления.
8.0 Концепция безопасности
С учетом усилия +/- 40 кН, которое может быть обеспечено линейными приводами, используемыми в качестве исполнительных механизмов, необходима система безопасности, гарантирующая, что смещения башни не превышают пределов усталости. Это требование применимо даже в том случае, если выходное усилие недостаточно для того, чтобы вызвать прогиб верхней части больше заданного значения +/- 200 мм. Одним из подходов к повышению безопасности системы было увеличение избыточности датчиков контроля, регистрирующих отклонение верхней части башни. Лучше всего этого можно достичь с помощью дополнительной независимой системы мониторинга, которая в идеале использует принцип измерения, отличный от фактически используемого контрольным оборудованием. Как уже говорилось, для представленного здесь проекта контрольное оборудование использовало акселерометр и заданный порог ускорения для полосовой фильтрации сигналов в диапазоне соответствующих частот собственных колебаний конструкции. Главной системой мониторинга высшего уровня является Глобальная навигационная спутниковая система (ГНСС), имеющая точность +/- 10 мм. ГНСС требуется базовая станция, которая преобразует данные координат в фактические значения реакции смещения. Если смещение вершины башни превысит заданный порог в моде искусственного возбуждения (что может быть связано с дополнительным ветром или другим возбуждением), реле переключит сигнал присутствия на 0 В. Это приведет к прерыванию моды возбуждения. Кроме того, обе системы мониторинга постоянно проверяют полученные данные на наличие ошибочных сигналов датчиков, что также приводит к прерыванию активной моды возбуждения. Ошибочные сигналы акселерометра/датчика положения/скорости обнаруживаются по критерию выделения спектральных пиков — допускается, что датчики выдают достоверные сигналы, только если в соответствующем диапазоне возможно выделение пиков. Система ГНСС анализирует изменение координатных данных, и если выборочные данные не меняются своевременно, автоматически предполагается ошибочный сигнал.
9.0 Вибрационные испытания
На текущем этапе проведены исходные вибрационные испытания башни, когда строительство еще не завершено, поэтому основные частоты башни на этом этапе превышают заданный диапазон настройки пассивной системы TMD. TMD настраивается на максимально возможную частоту настройки. Целью вибрационных испытаний было определение основных частот башни с заблокированной системой TMD, а также собственного конструкционного демпфирования. Кроме того, необходимо определить динамическое поведение с включенной пассивной системой TMD, а также увеличение конструкционного демпфирования благодаря пассивной системе TMD. Для определения основных частот собственных колебаний башни может использоваться [1] метод усредненной нормализованной спектральной плотности энерговыделения (ANPSD). Для этого записанные временные истории должны быть разделены на сегменты. Эти сегменты должны быть преобразованы в частотную область. Полученные спектры необходимо нормализовать, усреднить и умножить на комплексно-сопряженные спектры.
Благодаря этому вся случайная вибрация будет устранена, а в усредненном спектре, который теперь представляет собой преимущественно возбуждаемые собственные частоты башни, будут отображаться только повторяющиеся свободные колебания конструкции. На рис. 14 слева показаны записанные временные графики горизонтальных колебаний окружающей среды в направлениях x и y с заблокированной системой TMD. На рис. 14 справа показаны результирующие усредненные энергетические спектры для сегмента продолжительностью 120 с. Спектры показывают, что башня демонстрирует динамическую реакцию на двух доминирующих частотах (0,225 Гц в направлении x и 0,245 Гц в направлении y).
В дополнение к вышеописанному методу усредненного энергетического спектра (который предполагает, что внешнее возбуждение вызывает достаточную динамическую реакцию в рассматриваемых модах вибрации для обеспечения стохастической безопасности), собственные частоты были определены с использованием коммерческого ПО для обработки сигналов ARTEMIS, [1] которое включает методы расширенной декомпозиции в частотной области и стохастической идентификации подпространства.
Методы расширенной декомпозиции в частотной области (EFDD) и стохастической идентификации подпространства являются широко используемыми методами идентификации выходных модальных параметров.
Метод EFDD основан на расчете спектров реакции. Поэтому для уменьшения погрешности при оценке спектра и надежного получения модальных параметров необходимы длительные записи. Для идентификации мостов с использованием модели выходных параметров был применен алгоритм стохастической идентификации подпространства. Методы стохастической идентификации подпространства работают во временной области и основаны на описании пространства состояний динамической проблемы. Результаты идентификации системы на различных уровнях модели сравниваются, чтобы отличить истинные структурные моды от ложных мод на так называемых стабилизационных диаграммах. Эти диаграммы представляют собой популярный способ выбора идентифицированной модели системы, поскольку истинные структурные моды имеют тенденцию быть стабильными для последовательных уровней модели, удовлетворяя определенным критериям стабилизации, которые оцениваются в рамках автоматизированной процедуры. На рис. 15 показана результирующая карта стабильности для зарегистрированных данных об окружающей среде, по которой можно определить действующие моды. Идентифицированные моды и определенные коэффициенты демпфирования для каждой моды в состоянии с заблокированной системой TMD (слева) и активированной системой TMD (справа) также показаны на рис. 14. Можно заметить увеличение конструкционного демпфирования. Дополнительное конструкционное демпфирование находится в диапазоне теоретических значений, который может быть определен из теоретической модели, для которой рассматривалась расстроенная система TMD.
Помимо испытаний на вибрацию окружающей среды, в пассивной системе ДПВ проводились предварительные испытания с активной модой возбуждения, несмотря на расстроенное состояние системы ДПВ. На рис. 12 слева показан временной график зарегистрированных ускорений на вершине башни. После начального синусоидального возбуждения был активирован алгоритм для постоянного уровня ускорения с целью экспериментального определения корреляции между отклонением башни и вынужденным смещением массы ТМД. Временной график на рис. 12 демонстрирует два тестовых сценария в моде возбуждения, а соответствующие спектры БПФ показывают четкую реакцию башни на двух ее основных частотах (в направлениях x и y). Во временном интервале, выделенном зеленым цветом, имеется синусоидальное возбуждение массы с отключенным активным управлением, вызывающим динамическую реакцию в обоих основных направлениях. Результирующий спектр БПФ отображает два пика для определения основных частот в этих двух направлениях. Во временном интервале, выделенном синим цветом, имеется возбуждение с включенным активным управлением, вызывающим более устойчивое смещение башни преимущественно в одном направлении. Результирующее затухание вибрации после выключения моды возбуждения также использовалось для определения конструкционного демпфирования; результат был определен равным D=2,4 %. Этот результат соответствует коэффициенту демпфирования, определенному с помощью алгоритмов SSI.
10.0 Заключение и перспективы
Система TMD двойного назначения установлена на испытательной башне Thyssen Krupp высотой 246 м с целью преднамеренного возбуждения башни до контролируемой динамической реакции на ее основных частотах. Целью этого возбуждения является достижение определенного колебания здания в двух основных направлениях башни. На основе численных расчетов было установлено, что для достижения необходимого дополнительного демпфирования для пассивной моды и создания необходимого управляющего усилия для достижения смещения верха башни +/- 200 мм требуется масса TMD 240 т. Для создания постоянного уровня смещения для моды возбуждения и подавления перемещений, вызванных ветром и компонентом вынужденной вибрации в перпендикулярном направлении, с помощью численного моделирования был разработан и апробирован алгоритм управления. После установки пассивной системы TMD маятникового типа, для которой в качестве реакционной массы использовались сборные железобетонные плиты, были введены в эксплуатацию исполнительные механизмы и проведены первоначальные испытания. Испытания показали, что собственное демпфирование башни было выше, чем ожидалось, однако все действующие моды можно было четко определить. Активная мода возбуждения здания работает и может быть протестирована, хотя и не в полной мере для получения всех параметров работы, так как строительство здания еще не завершено. Из-за недостроенного состояния здания пассивная система TMD не могла быть адаптирована к определенным основным частотам.
Как только система TMD будет адаптирована, будут проведены дальнейшие испытания здания, которые также будут включать испытания амплитудно-зависимого демпфирования и целостности системы безопасности.
ССЫЛКИ
[1] Wenzel, H., Pichler, D., Schedler, R. (1991). „Ambiente Schwingungsmessungen zur System und Schadenserkennung an Tragwerken“, Bauingenieur 74
[2] Döhler, M., Andersen, P.: Mevel, L. (2012). “Operational Modal Analysis using a Fast Stochastic Subspace Identification Method”, Conference Proceedings of the Society for Experimental Mechanics Series
[3] Soong, T.T., Spencer, J.R. (2000). “Active, Semi-Active and hybrid control of structures” In 12th World Conference for Earthquake Engineering
[4] Ricciardelli, F.; Pizzimenti, A.D.; Mattei, M. (2003). Passive and active mass damper control of the response of tall buildings to wind gustiness. Eng. Struct., 25, 1199–1209
[5] Yang, N.Y.; Agrawal, A.K.; Samali, B.; Wu, J.C. Benchmark Problem for Response Control of Wind-Excited Tall Buildings. J. Eng. Mech. 2004, 130, 437–446.
[6] Watakabe, M.; Tohdp, M.; Chiba, O.; Izumi, N.; Ebisawa, H.; Fujita, T. Response control performance of a hybrid mass damper applied to a tall building. Earthq. Eng. Struct. Dyn. 2001, 30, 1655–1676.
[7] Tan, P.; Liu, Y.; Zhou, F.; Teng, J. Hybrid Mass Dampers for Canton Tower. CTBUH J. 2012, 24–29.
[8] Soong, T.T. “Active Structural Control: Theory and Practice”; John Wiley & Sons, Inc.: New York, NY, USA, 1990
[9] Preumont, A., Kazuto, S. (2008).”Active Control of Structures”, Wiley, Padstow
1.0 Введение/ История
Высотное здание (высотой 246 м) возведено на юго-западе Германии с целью испытаний инновационных лифтов. Башня имеет круглое основание диаметром 20 м и предоставляет место для 9 испытательных лифтовых шахт, пожарного лифта и стеклянного лифта с панорамным обзором. Кроме того, предусмотрено смещение на 220 м для использования в качестве механической подъемной шахты для программ испытаний.
Основание башни имеет диаметр 40 м, чтобы обеспечить дополнительное пространство для сервисной инфраструктуры, холла и образовательного центра. Со смотровой площадки на высоте 232 м — самой высокой в Германии — открывается захватывающий вид на Шварцвальд, а в ясные дни даже на Альпы.
2.0 Конструктивная система
Конструктивная система испытательной башни представляет собой железобетонную трубу диаметром 20,8 м, которая вдавлена в окружающий грунт на глубину 30 м (см. рис. 2). До уровня 110 м труба имеет толщину 40 см, а выше — 25 см. Грунт, состоящий из слоя верхнего триаса и лежащего под ним ракушечного известняка, обеспечивает высокую несущую способность, поэтому свайный фундамент не потребовался. В дополнение к зажиму окружающей почвой, широкая конструкция основания башни обеспечивает дополнительную боковую жесткость.
Внутреннее усиление бетонной трубы осуществляется в основном за счет внутренних стенок лифтовых шахт. Для доступа к лифтовым шахтам на некоторых уровнях высоты были установлены сборные потолочные плиты. Некоторые лифтовые шахты заканчиваются на уровне 115 м и перекрыты отлитыми на месте пролетными полами толщиной 40 см. Эти полы используются для офисных помещений. Надпустотное пространство до отметки 197 м используется в качестве теплового резервуара и для системы инерционного виброгашения (TMD). Верх башни используется для офисных помещений и остальных лифтовых шахт.
Отличительной особенностью испытательной башни является текстильный фасад, состоящий из стекловолоконной сетки с тефлоновым покрытием. Ширина апертуры сетки увеличивается с высотой здания, увеличивая прозрачность фасада, уменьшая плотность и вес материала и создавая аэродинамические эффекты.
Спиральная форма фасада предназначена для использования в качестве спирали Скратона, а сама ткань помогает затенить бетонную конструкцию в целях предотвращения тепловых напряжений, вызываемых солнечным излучением. При проектировании фасада и выборе материалов для установки необходимо было учитывать потребности в техническом обслуживании и долговечность, а также ветровую нагрузку.
3.0 Методика строительства
Строительство испытательной башни включало следующие этапы:
- Подготовка 30-метрового круглого котлована для основания башни Земляные работы с получением нужной формы выполнялись с использованием первоначального взрыва. После земляных работ котлован был закреплен грунтовыми анкерами с торкрет-бетонной облицовкой.
- Заливка ростверка
- Строительство вертикальной бетонной конструкции с использованием скользящей опалубки Все стены возводились непрерывно в течение 4 месяцев
- Установка плит перекрытия
- Строительство входной зоны.
4.0 Прогнозируемая динамическая реакция на ветровую нагрузку
Согласно прогнозу, частоты собственных колебаний испытательной башни будут находиться в диапазоне 0,17–0,20 Гц в зависимости от стадии строительства и состояния бетона (ломаный/неломаный) — см. Рис. 4.
Анализ ветровой нагрузки показал, что резонансное возбуждение конструкции возможно при скоростях ветра, соответствующих наземным значениям (на высоте 10 м) в диапазоне 55–60 км/ч. Ожидалось, что без дополнительного демпфирования это резонансное возбуждение приведет к прогибу верхней части примерно на +/- 750 мм, что не только вызовет дискомфорт для пассажиров, но и будет иметь значительные последствия для усталостной прочности бетонной конструкции башни (см. рис. 5). Для уменьшения динамической реакции на боковую ветровую нагрузку была реализована пассивная система инерционного виброгашения. Поскольку башня будет использоваться в качестве испытательной башни для строительства лифтового оборудования, чувствительного к раскачиванию, владелец искал возможность искусственного возбуждения нагрузки на башню в безветренные дни со смещениями, которые не вызывают проблем с усталостной прочностью. Требуемый уровень искусственного раскачивания находился в безопасном диапазоне примерно +/- 200 мм. Этот запрос дал редкую возможность реализовать систему гибридного виброгашения (HMD) или (поскольку проектная система отличается от других систем HMD, созданных в прошлом) так называемую систему инерционного виброгашения (TMD) двойного назначения. Система будет представлена в следующих главах, где будут рассмотрены оптимизация пассивной системы, конструкция исполнительного механизма, алгоритмы управления и система безопасности.
5.0 Оптимизация пассивной системы инерционного виброгашения
Параметры пассивной системы инерционного виброгашения (TMD) определялись с учетом трех аспектов: а) обеспечение достаточного дополнительного структурного демпфирования для уменьшения динамической реакции из-за возбуждения вихреобразования, b) ограничение результирующего перемещения основной массы TMD в пассивной моде до достижимого/практически целесообразного значения при возбуждении порывами бокового ветра и c) выбор массы TMD в соответствии с подводимой энергией, которая требуется для желаемого максимального отклонения башни в моде возбуждения, с учетом рабочего диапазона, обеспечиваемого предоставленными исполнительными механизмами (т. е. максимального создаваемого усилия и максимального хода во время работы). Для оптимизации системы TMD использовалась численная модель, которая представляла распределение массы башни и моменты инерции масс, указанные в заявленных конструктивных характеристиках. Элементы жесткости между этажами также были адаптированы к формам мод и частотам собственных колебаний по результатам полномасштабных наблюдений. На рис. 6 слева показаны формы мод и частоты собственных колебаний согласно используемой аналоговой модели. На рис. 6 слева также сравниваются формы мод аналоговой модели с подробной моделью, подготовленной строительным консультантом.
Кроме того, система TMD была дискретно смоделирована как маятниковая система с учетом ее эксцентрического положения на башне. Характеристики нагрузки для основного входного случая, т. е. резонансного возбуждения из-за вихреобразования, очень похожи на характеристики одногармонического возбуждения. Тем не менее, сосуществующая нагрузка порывов ветра по своей природе имеет стохастический характер, и для нее применимы критерии оптимизации, отличные от хорошо известного критерия Дена Хартога. Кроме того, относительные смещения массы ТMD при стохастической нагрузке больше, чем при гармонической. Поскольку для численного определения оптимальных параметров TMD следует учитывать нагрузку, близкую к реальной, был сгенерирован временной график, включающий как стохастическую нагрузку порывов ветра (на основе спектра Давенпорта), так и наложенную резонансную вихреобразную составляющую для представления общего поперечного ветрового возбуждения (см. рис. 3 справа). Уменьшение прогиба башни, которое может быть достигнуто с помощью оптимизированной пассивной системы TMD, а также результирующие смещения TMD показаны на рис. 3 справа. На основании этих результатов для предполагаемого внутреннего коэффициента конструкционного демпфирования ξ = 0,8 % было определено, что для удержания смещения в пределах +/- 650 мм при сохранении оптимального коэффициента демпфирования TMD для достижения наилучших характеристик TMD требуется масса TMD 240 т. Увеличение демпфирования TMD могло бы уменьшить перемещение, при этом эффективность оставалась бы достаточной, но это отрицательно повлияло бы на требования к усилию исполнительного механизма. С целью определения требуемых усилий для оптимальной конфигурации TMD 240 т использовалась аналоговая модель для проверки того, что при максимальном усилии 40 кН от исполнительных механизмов можно достичь прогиба башни в диапазоне +/- 200 мм. На рис. 4 показаны результаты численного моделирования во временной области на аналоговой числовой модели; для этого отображаются результирующие отклонения вершины башни, отклонения массы TMD и вызывающие их входные активные силы.
6.0 Описание системы управления
Двойственность системы управления служит для: a) уменьшения энергопотребления при нормальной пассивной работе с целью снижения возникающих вибраций и b) снижения требований к усилию исполнительных механизмов за счет использования резонансных эффектов для возбуждения основной массы TMD для достижения необходимого фактического усилия. Таким образом, по сравнению с другими системами управления (см. рис. 1), исполнительные механизмы соединяют основную конструкцию и массу TMD, но не используются для непосредственного управления массой TMD, как это было бы в случае типичной активной системы инерционного виброгашения/демпфирования. Для реализуемой системы TMD двойного назначения для пассивной работы была выбрана реактивная масса 240 т. Для рабочей моды возбуждения два линейных привода (по одному в каждом основном направлении) крепятся к массе TMD с помощью шарниров вблизи центра тяжести для предотвращения артефактов кручения. Каждый линейный привод может создавать силы до 40 кН с ходом макс. +/-600 мм (см. рис. 2). Линейные приводы могут отсоединяться, чтобы подшипники исполнительных механизмов не влияли на пассивную моду в маловероятном случае отказа подшипников.
Для определения верхнего уровня башни и ускорений массы TMD система оснащена 4 одноосными акселерометрами (сейсмическими акселерометрами K-Beam/MEMS; по одному в каждом направлении). Сигналы ускорения проходят полосовую фильтрацию в диапазоне частот собственных колебаний башни (0,1–0,3 Гц) и интегрируются для определения скоростей и отклонений башни. Кроме того, интегрированные значения смещения можно сравнивать со значениями дополнительной Глобальной навигационной спутниковой системы, также установленной наверху для сравнения дрейфа сигналов. Соответственно были выполнены исходные корреляционные испытания. Кроме того, перемещения TMD контролируются непосредственно с помощью датчиков положения/скорости и индуктивной системы измерения длины, встроенной в линейные двигатели.
7.0 Алгоритм управления
Общий контур управления для башни, показанный на рис. 5, иллюстрирует последовательность управления с обратной связью. Детальная разработка алгоритма управления требует аналитических моделей взаимодействия исполнительных механизмов и массы TMD для определения связи между входным сигналом исполнительного механизма и прилагаемым усилием действия. Они должны сочетаться с аналитической моделью основной конструкции, описывающей общее динамическое поведение здания. Кроме того, в отличие от стандартных алгоритмов управления, которые применялись в других случаях применения HMD, как, например, в [2],[3] или изучались теоретически, как, например, в [1] , алгоритм управления для этого случая применения башни должен был учитывать синхронное управляемое возбуждение в одном основном направлении и уменьшение вибрации в перпендикулярном направлении. Поскольку динамическая реакция по большей части ожидается в основных модах, для обеих этих задач может применяться линейное управление с обратной связью со всеми его преимуществами с точки зрения предотвращения нестабильностей. Для простой практической реализации управления линейное управление с обратной связью, ослабляющее динамическую реакцию башни в направлении, перпендикулярном возбуждению, приводит в действие соответствующий исполнительный механизм посредством заданной взвешенной линейной суммы 7 структурно-динамических измеряемых параметров. Этими измеряемыми параметрами являются: ускорение TMD и вершины башни, скорость TMD и вершины башни, смещения TMD и вершины башни, а также смещение TMD относительно вершины башни. Важно отметить, что предварительно выбранные весовые коэффициенты представляют собой простые (положительные или отрицательные) скалярные значения усиления. Параметризация весовых коэффициентов основана на динамических испытаниях башни и не использует частотно-зависимую модификацию. Активная обратная связь исполнительного механизма рассчитывается мгновенно (при частоте 50 Гц) и также является линейной комбинацией ранее указанных динамических измеряемых параметров. Нелинейные манипуляции не используются. Для демонстрации эффективности подавления вибраций органов управления исполнительным механизмом схема управления также была реализована в численном моделировании во временной области (т. е. с помощью прямого интегрирования). Для моды возбуждения использовался тот же подход к управлению в сочетании с компенсацией смещения, которая представляет собой возбуждение башни до желаемого значения смещения. Компенсация представляет собой синусоидальную функцию на основе обнаруженной основной частоты по каждому направлению. Выходной сигнал управления для противодействия изменению смещения верхней части из-за других возмущений затем модулируется синусоидальной функцией смещения, и управляющее значение корректируется соответствующим образом.
Линейное управление с обратной связью для уменьшения динамической реакции башни в направлении, перпендикулярном возбуждению, позволяет подавать команду усилия на исполнительный механизм как заданную взвешенную линейную сумму 7 измеряемых динамических параметров. Этими 7 измеряемыми параметрами являются: ускорение TMD и башни, скорость TMD и башни, смещения TMD и башни, а также смещение TMD относительно башни. Важно отметить, что предварительно выбранные весовые коэффициенты представляют собой простые (положительные или отрицательные) скалярные значения усиления. Параметризация весового коэффициента основана на экспериментальных динамических испытаниях башни. Обратная связь исполнительного механизма рассчитывается мгновенно (при частоте 50 Гц) , а весовые коэффициенты представляют собой скалярные значения, которые не используют каких-либо частотно-зависимых функций переноса. Кроме того, обратная связь представляет собой линейную комбинацию динамических характеристик. Нелинейные манипуляции или логики не используются. Схема управления также была реализована в численном моделировании во временной области (т. е. с помощью прямого интегрирования), поэтому для каждого временного шага в качестве управления исполнительным механизмом можно адаптировать усилие, подводимое к массе TMD. На рис. 12 показаны результаты моделирования для подавления вибраций — смещения башни и результирующее перемещение массы TMD.
Для моды возбуждения использовался тот же подход к управлению в сочетании с компенсацией, которая представляет собой возбуждение башни до желаемого значения смещения. Компенсация представляет собой синусоидальную функцию на основе обнаруженной основной частоты по каждому направлению. Выходной сигнал управления для противодействия изменению смещения верхней части из-за других возмущений затем модулируется синусоидальной функцией смещения, и управляющее значение корректируется соответствующим образом. Для этой компенсации был экспериментально определен весовой коэффициент. На рис. 13 представлены численные результаты с возмущением порывистых нагрузок для моды возбуждения с простым синусоидальным возбуждением и примененным алгоритмом управления.
8.0 Концепция безопасности
С учетом усилия +/- 40 кН, которое может быть обеспечено линейными приводами, используемыми в качестве исполнительных механизмов, необходима система безопасности, гарантирующая, что смещения башни не превышают пределов усталости. Это требование применимо даже в том случае, если выходное усилие недостаточно для того, чтобы вызвать прогиб верхней части больше заданного значения +/- 200 мм. Одним из подходов к повышению безопасности системы было увеличение избыточности датчиков контроля, регистрирующих отклонение верхней части башни. Лучше всего этого можно достичь с помощью дополнительной независимой системы мониторинга, которая в идеале использует принцип измерения, отличный от фактически используемого контрольным оборудованием. Как уже говорилось, для представленного здесь проекта контрольное оборудование использовало акселерометр и заданный порог ускорения для полосовой фильтрации сигналов в диапазоне соответствующих частот собственных колебаний конструкции. Главной системой мониторинга высшего уровня является Глобальная навигационная спутниковая система (ГНСС), имеющая точность +/- 10 мм. ГНСС требуется базовая станция, которая преобразует данные координат в фактические значения реакции смещения. Если смещение вершины башни превысит заданный порог в моде искусственного возбуждения (что может быть связано с дополнительным ветром или другим возбуждением), реле переключит сигнал присутствия на 0 В. Это приведет к прерыванию моды возбуждения. Кроме того, обе системы мониторинга постоянно проверяют полученные данные на наличие ошибочных сигналов датчиков, что также приводит к прерыванию активной моды возбуждения. Ошибочные сигналы акселерометра/датчика положения/скорости обнаруживаются по критерию выделения спектральных пиков — допускается, что датчики выдают достоверные сигналы, только если в соответствующем диапазоне возможно выделение пиков. Система ГНСС анализирует изменение координатных данных, и если выборочные данные не меняются своевременно, автоматически предполагается ошибочный сигнал.
9.0 Вибрационные испытания
На текущем этапе проведены исходные вибрационные испытания башни, когда строительство еще не завершено, поэтому основные частоты башни на этом этапе превышают заданный диапазон настройки пассивной системы TMD. TMD настраивается на максимально возможную частоту настройки. Целью вибрационных испытаний было определение основных частот башни с заблокированной системой TMD, а также собственного конструкционного демпфирования. Кроме того, необходимо определить динамическое поведение с включенной пассивной системой TMD, а также увеличение конструкционного демпфирования благодаря пассивной системе TMD. Для определения основных частот собственных колебаний башни может использоваться [1] метод усредненной нормализованной спектральной плотности энерговыделения (ANPSD). Для этого записанные временные истории должны быть разделены на сегменты. Эти сегменты должны быть преобразованы в частотную область. Полученные спектры необходимо нормализовать, усреднить и умножить на комплексно-сопряженные спектры.
Благодаря этому вся случайная вибрация будет устранена, а в усредненном спектре, который теперь представляет собой преимущественно возбуждаемые собственные частоты башни, будут отображаться только повторяющиеся свободные колебания конструкции. На рис. 14 слева показаны записанные временные графики горизонтальных колебаний окружающей среды в направлениях x и y с заблокированной системой TMD. На рис. 14 справа показаны результирующие усредненные энергетические спектры для сегмента продолжительностью 120 с. Спектры показывают, что башня демонстрирует динамическую реакцию на двух доминирующих частотах (0,225 Гц в направлении x и 0,245 Гц в направлении y).
В дополнение к вышеописанному методу усредненного энергетического спектра (который предполагает, что внешнее возбуждение вызывает достаточную динамическую реакцию в рассматриваемых модах вибрации для обеспечения стохастической безопасности), собственные частоты были определены с использованием коммерческого ПО для обработки сигналов ARTEMIS, [1] которое включает методы расширенной декомпозиции в частотной области и стохастической идентификации подпространства.
Методы расширенной декомпозиции в частотной области (EFDD) и стохастической идентификации подпространства являются широко используемыми методами идентификации выходных модальных параметров.
Метод EFDD основан на расчете спектров реакции. Поэтому для уменьшения погрешности при оценке спектра и надежного получения модальных параметров необходимы длительные записи. Для идентификации мостов с использованием модели выходных параметров был применен алгоритм стохастической идентификации подпространства. Методы стохастической идентификации подпространства работают во временной области и основаны на описании пространства состояний динамической проблемы. Результаты идентификации системы на различных уровнях модели сравниваются, чтобы отличить истинные структурные моды от ложных мод на так называемых стабилизационных диаграммах. Эти диаграммы представляют собой популярный способ выбора идентифицированной модели системы, поскольку истинные структурные моды имеют тенденцию быть стабильными для последовательных уровней модели, удовлетворяя определенным критериям стабилизации, которые оцениваются в рамках автоматизированной процедуры. На рис. 15 показана результирующая карта стабильности для зарегистрированных данных об окружающей среде, по которой можно определить действующие моды. Идентифицированные моды и определенные коэффициенты демпфирования для каждой моды в состоянии с заблокированной системой TMD (слева) и активированной системой TMD (справа) также показаны на рис. 14. Можно заметить увеличение конструкционного демпфирования. Дополнительное конструкционное демпфирование находится в диапазоне теоретических значений, который может быть определен из теоретической модели, для которой рассматривалась расстроенная система TMD. Помимо испытаний на вибрацию окружающей среды, в пассивной системе ДПВ проводились предварительные испытания с активной модой возбуждения, несмотря на расстроенное состояние системы ДПВ. На рис. 12 слева показан временной график зарегистрированных ускорений на вершине башни. После начального синусоидального возбуждения был активирован алгоритм для постоянного уровня ускорения с целью экспериментального определения корреляции между отклонением башни и вынужденным смещением массы ТМД. Временной график на рис. 12 демонстрирует два тестовых сценария в моде возбуждения, а соответствующие спектры БПФ показывают четкую реакцию башни на двух ее основных частотах (в направлениях x и y). Во временном интервале, выделенном зеленым цветом, имеется синусоидальное возбуждение массы с отключенным активным управлением, вызывающим динамическую реакцию в обоих основных направлениях. Результирующий спектр БПФ отображает два пика для определения основных частот в этих двух направлениях. Во временном интервале, выделенном синим цветом, имеется возбуждение с включенным активным управлением, вызывающим более устойчивое смещение башни преимущественно в одном направлении. Результирующее затухание вибрации после выключения моды возбуждения также использовалось для определения конструкционного демпфирования; результат был определен равным D=2,4 %. Этот результат соответствует коэффициенту демпфирования, определенному с помощью алгоритмов SSI.
10.0 Заключение и перспективы
Система TMD двойного назначения установлена на испытательной башне Thyssen Krupp высотой 246 м с целью преднамеренного возбуждения башни до контролируемой динамической реакции на ее основных частотах. Целью этого возбуждения является достижение определенного колебания здания в двух основных направлениях башни. На основе численных расчетов было установлено, что для достижения необходимого дополнительного демпфирования для пассивной моды и создания необходимого управляющего усилия для достижения смещения верха башни +/- 200 мм требуется масса TMD 240 т. Для создания постоянного уровня смещения для моды возбуждения и подавления перемещений, вызванных ветром и компонентом вынужденной вибрации в перпендикулярном направлении, с помощью численного моделирования был разработан и апробирован алгоритм управления. После установки пассивной системы TMD маятникового типа, для которой в качестве реакционной массы использовались сборные железобетонные плиты, были введены в эксплуатацию исполнительные механизмы и проведены первоначальные испытания. Испытания показали, что собственное демпфирование башни было выше, чем ожидалось, однако все действующие моды можно было четко определить. Активная мода возбуждения здания работает и может быть протестирована, хотя и не в полной мере для получения всех параметров работы, так как строительство здания еще не завершено. Из-за недостроенного состояния здания пассивная система TMD не могла быть адаптирована к определенным основным частотам.
Как только система TMD будет адаптирована, будут проведены дальнейшие испытания здания, которые также будут включать испытания амплитудно-зависимого демпфирования и целостности системы безопасности.
ССЫЛКИ
[1] Wenzel, H., Pichler, D., Schedler, R. (1991). „Ambiente Schwingungsmessungen zur System und Schadenserkennung an Tragwerken“, Bauingenieur 74
[2] Döhler, M., Andersen, P.: Mevel, L. (2012). “Operational Modal Analysis using a Fast Stochastic Subspace Identification Method”, Conference Proceedings of the Society for Experimental Mechanics Series
[3] Soong, T.T., Spencer, J.R. (2000). “Active, Semi-Active and hybrid control of structures” In 12th World Conference for Earthquake Engineering
[4] Ricciardelli, F.; Pizzimenti, A.D.; Mattei, M. (2003). Passive and active mass damper control of the response of tall buildings to wind gustiness. Eng. Struct., 25, 1199–1209
[5] Yang, N.Y.; Agrawal, A.K.; Samali, B.; Wu, J.C. Benchmark Problem for Response Control of Wind-Excited Tall Buildings. J. Eng. Mech. 2004, 130, 437–446.
[6] Watakabe, M.; Tohdp, M.; Chiba, O.; Izumi, N.; Ebisawa, H.; Fujita, T. Response control performance of a hybrid mass damper applied to a tall building. Earthq. Eng. Struct. Dyn. 2001, 30, 1655–1676.
[7] Tan, P.; Liu, Y.; Zhou, F.; Teng, J. Hybrid Mass Dampers for Canton Tower. CTBUH J. 2012, 24–29.
[8] Soong, T.T. “Active Structural Control: Theory and Practice”; John Wiley & Sons, Inc.: New York, NY, USA, 1990
[9] Preumont, A., Kazuto, S. (2008).”Active Control of Structures”, Wiley, Padstow
Поделиться этим постом
Поделиться этим постом
Другие ресурсы
Вам нужна дополнительная информация по этой теме?
Просим вас без колебаний обращаться к нам со своим вопросом.
Один из наших проектных инженеров свяжется с вами в ближайшее время.
Другие ресурсы
Вам нужна дополнительная информация по этой теме?
Просим вас без колебаний обращаться к нам со своим вопросом.
Один из наших проектных инженеров свяжется с вами в ближайшее время.